
|
|||||
|
|
|||||
|
|||||||||||||||||||
 |
|||||||||||||||||||
| Wofür?
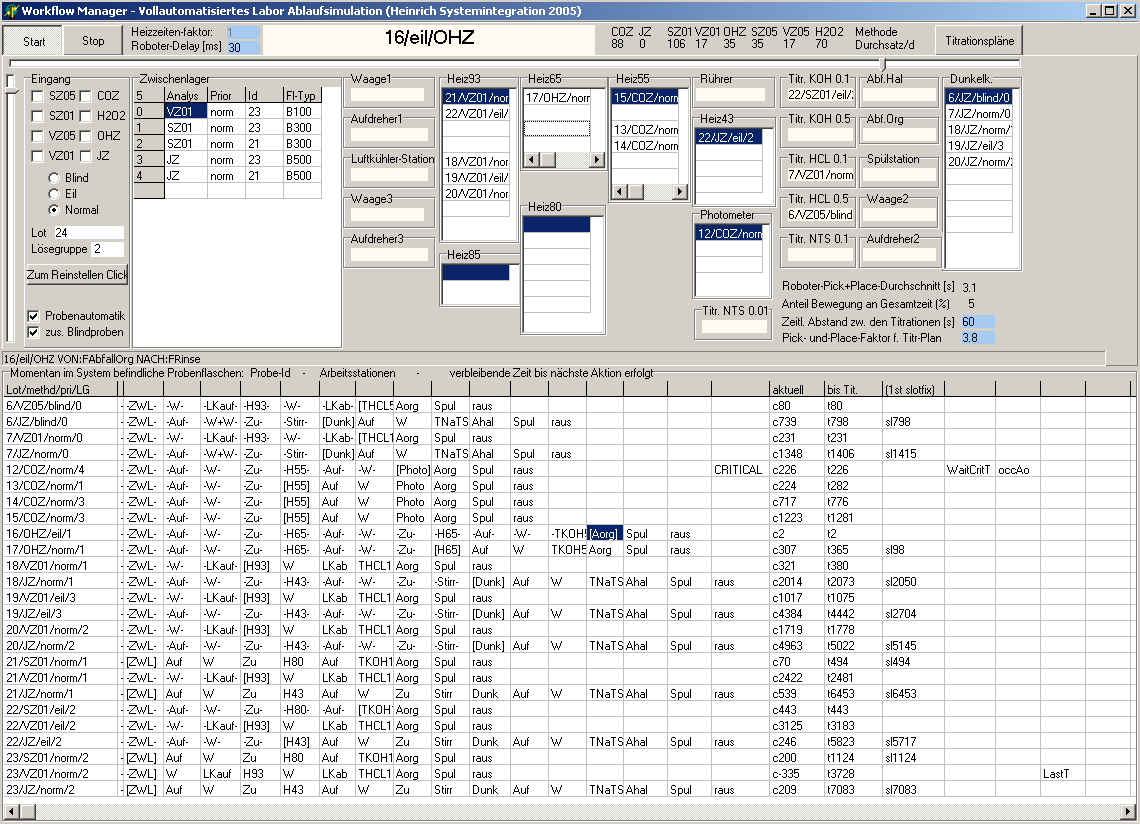
Das Programm dient der Evaluierung eines Szenarios, in dem 6 verschiedene Qualitätskontroll-Parameter für organische Lösungsmittel, Öle, Fette und Harze nasschemisch vollautomatisch parallel in einer 12m2 Roboterkammer gemessen werden (Säurezahl, Carbonylzahl, Jodzahl, Verseifungszahl, Peroxid-Zahl, OH-Zahl). Es ist gleichzeitig mit der Machbarkeitsstudie eine Studie zur Optimierung solcher Anlage durch die damit mögliche Ermittlung der Bottlenecks. Die Zugabe der jeweiligen Lösungsmittel und Reagenzien erfolgt auf Wägestationen, danach werden die Proben eine wohldefinierte Zeit geheizt und danach titriert. Es stehen nur eine begrenzte Zahl an Wägestationen, Heizplätzen und Titratoren zur Verfügung Die Zahlen hinter den Heiz-Boxen stehen für die jeweilige Temperatur des Heizblockes. Es müssen nach der Reagenzienzugabe sehr genau die Heizzeiten bis zur Titration bzw. photometrischen Vermesung eingehalten werden, Max.Toleranz: 3 Sek. Die aktuelle Roboterposition wird durch die beiden Positionsanzeiger links und oben dargestellt - der Zustand der Roboterhand im hellgelben Fenster oben in der Mitte: "leer", falls er eine leerfahrt macht, ansonsten die ID der Probe, die er hält. Ablauf: Um eilige Proben auch zu Stoßzeiten mit hohem Probenanfall einstellen zu können, gibt es ein Zwischenlager, in welches die Proben nach dem Eingang vom Roboter einsortiert werden. Es gibt 100ml 300ml und 500ml Flaschen, entsprechend dem Parameter, der bei der jeweiligen Probe gemessen werden soll. Die Kabine wird beschickt, indem im Eingang angeklickt wird, welche Sorte Proben der Laborant im Probengestell der Roboterkabine übergibt, und dann auf den "Einstellen" -Button geklickt wird. Wenn "Probenautomatik" markiert ist, so generiert sich das Programm selber einen zufälligen Probeneingang - mit oder ohne Blindproben. Die eingegangenen Proben werden zunächst ins Zwischenlager einsortiert, damit sich im Probeneingang nichts staut. Danach werden die Proben zu einer der beiden Aufdreh-Stationen gebracht, aufgedeckelt, und zur Wägestation verbracht, wo das jeweilige Reagenz für die Analytik waagenkontrolliert zugegeben wird. Dann geht es zurück zum Aufdreher, wo der Deckel wieder draufgeschraubt wird. Mit geschlossenem Deckel wandert die Probe zu einem Heizer, verbleibt dort eine definierte Reaktionszeit unter Heizen und Rühren. Danach erfolgt sekundengenau die Titration oder photometrische Vermessung. Ein roter Balken auf einer Arbeitsstation zeigt an, dass diese nicht mir einer Aktion belegt werden darf, weil sie bereits besetzt ist - beispielsweise der Aufdreher, wenn er bereits einen Deckel hält. Am Ende der Titration werden die Abfälle in halogenierte (Jodzahl...) und nicht halogenierte unterteilt automatisch in Abfallfässer abgefüllt, die Gläser kurz vorgespült, bevor sie über ein Förderband aus der Kabine in einen Auffangkorb entlassen werden. Optimierungsalgorithmen, Heuristik Die Software nutzt bereits kurze Wartezeiten (Aufdrehen des Deckels, Reagenzzugabe), um dem einarmigen 5-Achsen-Roboter auf der Lineareinheit eine neuen anstehenden Job zu erteilen. In der Simulation wandern die Proben-ID's von Arbeitsstation zu Arbeitsstation. Man erhält nach ein bis zwei Tagen Durchlauf mit zufälliger Probengenerierung interessante Statistiken, wie den erzielten Durchsatz pro Probenart, die Auslastung und Verfahrzyklen des Industrieroboters, die Kollisionswartezeiten, d.h. was Durchsatzlimitierend war. Der Workflow-Algorithmus in der Software ist im Prinzip bereits dazu geeignet, die Roboterkabine anzutreiben. Er basiert auf den realistischen Zeiten für die gesamten Elemente des Systems. Was fehlt, sind allein: Die Geräte-Ansteuerungsschicht, die Sicherheitsmodule, die Datenbankanbindung, die Anbindung an den Wägeplatz mit Barcode-Drucker. Und teilweise die Hardware. Das Programm wird bei Interesse als Arbeitsprobe per e-mail übermittelt: KONTAKT. |
|||||||||||||||||||