
|
|||||
|
|
|||||
|
|||||
|
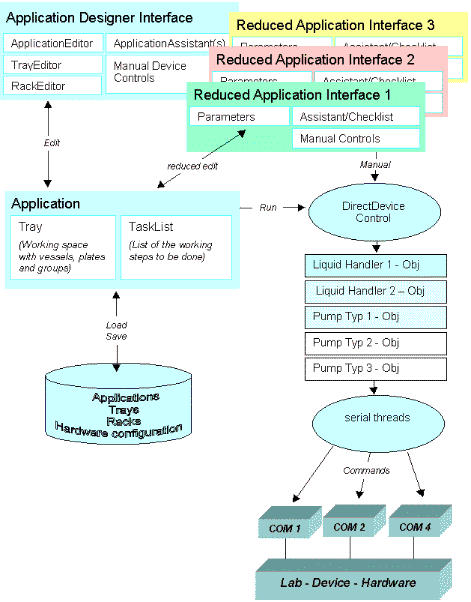
Die ALADIN Software ist ein weitgehend Hardware-unabhängiges Framework für automatisiertes Liquid Handling und Laborautomation. Es bietet eine intuitiv bedienbare graphische Oberfläche für das Design des Pipetierroboter-Arbeitsbereichs und einen taskorientierten Ablaufeditor. Viele Liquid Handler sind bereits betreibbar, weitere lassen sich zusätzlich einbinden. Unterstützt werden: Kartesische Pipetierroboter (2-bis 3-Achsen Autosampler, Fraktionierer), Spritzen-dosiereinheiten, Peristaltikpumpen, Schaltventile, Analog- und Digital-/O-Interfaces, Hochdruckpumpen. Mehrere Pipetierroboter lassen sich zusammen in einer Applikation betreiben. Während der Methodenentwicklung bietet das ALADIN-framework die Möglichkeit der Änderung von Parametern während des Laufes, was die Methodenentwicklung verkürzt. |
|||||
 |
|||||
|
Die Software bietet einen komplett frei definierbaren kartesischen Arbeitsbereich für jeden der angeschlossenen Liquid Handler. Es spielt dabei Keine Rolle, ob es sich um einen Mikromanipulator oder einen Hochdurchsatz-Screening-Roboter mit meterlangen Verfahrwegen handelt. |
|||||
 |
|||||
|
Der Roboter-Arbeitsbereich mit seinen Probenträgern und Reagenzien wird grafisch oder otional in Tabellen editiert - in etwa vergleichbar mit einem Vektorgrafikprogramm wie Corel Draw. Der Arbeitsablauf basiert auf einem bewährten Task-Konzept mit in sich abgeschlossenen Teilaufgaben, die beliebig zusammengesetzt werden können. In jedem Einzelschritt ist vorgebbar, mit welchen Gerätekomponenten des Gesamtsystems der Arbeitsschritt arbeitet. Die Software bietet einen Mitschnitt aller Datentransfers in einem filterbaren Log-File, was die Erfüllung der 21CFR11-Regularien erleichtert. |
|||||
 |
|||||
|
Zusätzliche Task-Module oder reduzierte Anwendungsoberflächen erlauben die Anwendungsspezifische Anpassung des Frameworks zu geringen Kosten. |
|||||
 |
|||||